



| 品牌 : | 文圣 | 型号 : | VS-IR03 |
| 加工定制 : | 是 | 适用范围 : | 教学实训 |
| 电工电器设备名称 : | 工业机器人实训系统 | 特色服务 : | 维修一年 |
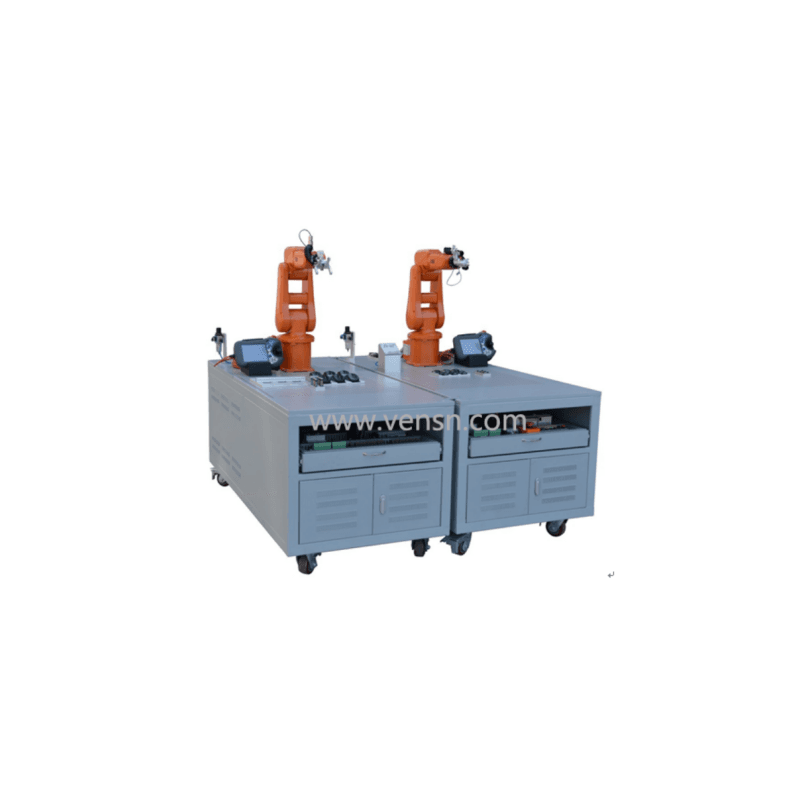
VS-IR03工业机器人实训系统(鼠标装配)
一、设备概述
随着现代制造业和服务业的转型升级,工业机器人在测量检验、包装、分拣处理、搬运、码垛、填装、机器上下料、装配、金属切割、焊接、喷涂等领域得到了越来越多的应用。在不同领域的应用会对机器人的安装、编程、调试人员提出了不同的要求。根据现实工业情况,设计研发了VS-IR03工业机器人实训系统(鼠标装配)。该系统可将无线鼠标的散件(无线接收器,电池,后盖,底板),通过两个三菱机器人的协作,将无线鼠标装配完成。
二、技术指标
1、交流电源:单相 AC 220 V±10% 50Hz;
2、温度:-10~50℃;环境湿度:≤90%无水珠凝结;
3、外形尺寸:长×宽×高=(1600×1500×1450)mm
4、整机功耗:≤5kW
5、安全保护措施:具有接地保护、漏电保护、断电保护功能,安全性符合相关的国家标准。
三、功能
1、该系统主要由2个工作站组成、可以协作运行,也可单独运动。
2、整个设备的工艺流程是将无线鼠标的一些散件进行装配。
3、智能考核评分系统:
配有基于windows操作系统监控操作一体机,具有手指触屏功能,与故障开关箱设置故障具有同等功能,通过通讯对设备进行远程故障设置,当学操作完成故障查找后,可向监控操作一体机输入查找的故障点,监控操作一体机将学员输入的故障点与数据库中题库答案进行比较运算得出学员对与错及给相应分数,与此同时监控操作一体通过总线方式向教师机进行发送学员所得分数,教师也可以远程进行故障点设置。完成学生的评分等自动化操作,系统采用LABVIEW软件与工业网络软件结构,可靠性高。
4、配套软件二:《工业自动化仿真培训系统3D软件》仿真培训系统包括学习模式、实操模式和考核模式:
(1)学习模式:学员可以通过常用机电元器件库(电气类、仪表类),了解各元器件的3D结构、性能参数或进行组装,也可直接调用查看机电专业的PPT课件资料进行学习,目前系统自带的课件有机电一体化概述、检测与传感器、步进及伺服电机、机械传动、控制系统、接口技术、伺服系统,教师可以对这些PPT课件进行编辑,通过【TDu PPT3D Extend Helper】PPT扩展接口,将元器件中的3D模型或其它多媒体素材,引入到课件中。
实操模式:学员可以选择一种电路类型,参照对应的电气图纸,从元器件库中拖入正确的元器件,进行电路组装,设定各元器件的工作参数,对相应的元器件触点进行导线链接,在系统规定的时间内完成整个电路图的组装,并进行电路的仿真运行。系统支持在元器件布局、仿真接线、仿真运行状态间快速切换,方便教学使用。目前内置的电路图有接触器控制的双速电动机调速电路、时间继电器控制电路、接触器星形三角形控制电路、双重互锁正反转控制电路、具有过载保护的正转控制电路、生产机械行程控制电路、自耦降压起动电路。
(2)考核模式:考核模式带有MySQL数据库(或用户自行提供其它数据库系统),由教学指定要考核的电路图(或系统随机抽取),学员在规定的时间内完成电路装配,提交后系统进行自动评分,同时学员的成绩和装配数据会写入到数据库中做备案。考核模式不可切换到学习模式或实操模式进行参考。
1)系统基于"双元制虚拟仿真教学云平台"运行,能够实现大量并行用户在线操作;
2)理论学习整合了常规的课件学习与3D模型相结合的方式,课件可以支持word,ppt,pdf等格式转换而来,支持页面跳转、缩放、翻转、抗锯齿、灰度显示、高对比度显示等调整;
3)支持VRML,X3D,3DMax,Maya,Cinema4D,Blender,ProE,UG,Soilworks,OpenFlight,DXF,DAE,FBX等常用工程3D资源导入;
4)装配模块能够实现智能虚拟互动随意拆卸与装配, 并能自动判断拆装操作的正确性;
5)3D模型逼真度高,运行速度快,数据量小,在系统中所有数据实现256位随机加密;
6)3D元器件支持任意方向旋转及视点切换,所有部件都可360度全方位观看;
7)关键元器件,提供爆炸图、操作互动、原理讲解等3D资源;
8)支持3D立体显示:红蓝模式,主动快门式,不闪偏光式;
9)电气、液压、气动原理图并支持全屏、平移,缩放,自适应大小功能;
10)所有资源写在配置文件中,教师可定制自己的理论学习教程;
11)仿真接线过程中,支持元器件布局、仿真接线、仿真运行3种状态间快速切换,方便老师教学讲解;
12)仿真运行过程有整合元器件工作的声音、灯光、鼠标状态变化,使3D场景贴合实际生产环境;
13)软件开发过程,始终贯彻企业生产过程中的6S要求--整理(SEIRI)、整顿(SEITON)、清扫(SEISO)、清洁(SEIKETSU)、素养(SHITSUKE)、安全(SECURITY),提前培养学生的职业认知能力。
四、实训项目
1、硬件的安装与调试实训
1)工业机器人底座的安装与调试技术实训
2)工业机器人安装与调试技术实训
3)工业机器人夹具安装与调试技术实训
2、电气安装与调试实训
1)工业机器人本体与控制器之间的电气连接与调试技术实训
2)工业机器控制器和控制柜之间电气连接与调试技术实训
3)工业机器人夹具电气连接与调试技术实训
4)机器人与机器人之间的电气连接实训
3、编程调试和应用实训
1)工业机器人编程调试软件的安装实训
2)工业机器人通过示教器对工业机器人的运作过程调试实训
3)通过计算机软件对工业机器人的运作过程调试实训
4)通过I/0板对机器人运作的控制实训
5)机器人控制数据库的建立和应用实训
6)工业机器人装配运行的编写实训
7)工业机器人平面轨迹运行的编写实训
8)工业机器人垂直轨迹运行的编写实训
9)可编程控制器程序的编写和设计实训
10)机器人与可编程控制器的CClink通讯设置实训
4、设备的维护和保养实训
1)能够按照机器人操作规程对机器人进行安全检查实训
2)根据系统的异常,机械故障进行简单的维修和保养实训
3)工业机器人的日、周、月检查与维护实训
五、设备配置清单
站号 | 序号 | 名称 | 规格 | 单位 | 数量 |
| 1 | 工作台 | 桌面尺寸:800*1750mm;带有电气安装网孔板抽屉;三面双开门,方便机器人控制柜的安装和调试;桌面机器人安装位置采用10mm厚的钢板磨平;桌子内带有一个工具箱,方便放置工具和配件;轮子采用能承受1000Kg并带刹车;桌子整体结构采用方管一次性焊接而成。 | 台 | 1 |
2 | 工业机器人(包括控制器) | 规格: | 台 | 1 | |
3 | 控制系统 | 可变程控制器:工作电压220V;输入16点,输出16点;自带24V输出。通讯模块(与控制器相匹配):工作电压24V: | 个 | 1 | |
4 | 按钮单元 | 指示灯3只;按钮2只;急停按钮1只;转换开关1只;17位接线端子1条;铁盒子1只。 | 只 | 1 | |
5 | 开关电源 | 机器人标配开关电源 | 只 | 1 | |
6 | 接线端子1 | 输入13位,输出16位;共三层,一层为电源负极端子、 | 只 | 1 | |
7 | 接线端子2 | 输入13位,输出16位;共三层,一层为电源负极端子和电源正极、二层为信号端子。带有模组安装。 | 只 | 1 | |
8 | 信号连接电缆1 | 15芯D型接头连接电缆,长度3m。 | 条 | 1 | |
9 | 信号连接电缆2 | 17芯D型接头连接电缆,长度3m。 | 条 | 1 | |
10 | 急停按钮盒 | 急停按钮1只,指示灯1只。 | 只 | 1 | |
11 | 气动装置 | 油水分离器1只,二位五通双向电磁阀1只。 | 只 | 1 | |
| 1 | 工作台 | 桌面尺寸:800*1750mm;带有电气安装网孔板抽屉;三面双开门,方便机器人控制柜的安装和调试;桌面机器人安装位置采用10mm厚的钢板磨平;桌子内带有一个工具箱,方便放置工具和配件;轮子采用能承受1000Kg并带刹车;桌子整体结构采用方管一次性焊接而成。 | 台 | 1 |
2 | 工业机器人(包括控制器) | 规格:工作范围:580mm;有效荷重:3kg;自由度:6轴; | 台 | 1 | |
3 | 按钮单元 | 指示灯3只;按钮2只;急停按钮1只;转换开关1只;17位接线端子1条;铁盒子1只。 | 只 | 1 | |
4 | 开关电源 | 输入AC220V,输出DC24V/6A。 | 只 | 1 | |
5 | 接线端子1 | 输入13位,输出16位;共三层,一层为电源负极端子、二层为信号端子、三层为电源正极端子。带有模组安装。 | 只 | 1 | |
6 | 接线端子2 | 输入13位,输出16位;共三层,一层为电源负极端子和电源正极、二层为信号端子。带有模组安装。 | 只 | 1 | |
7 | 信号连接电缆1 | 15芯D型接头连接电缆,长度3m。 | 条 | 1 | |
8 | 信号连接电缆2 | 17芯D型接头连接电缆,长度3m。 | 条 | 1 | |
9 | 气动控制阀 | 油水分离器1只,二位五通双向电磁阀1只,二位五通单相电磁阀2只,汇流板1只,真空发生器5只,真空吸盘5只。 | 只 | 1 | |
其他 | 1 | 控制器编程软件 | 与该牌子控制器硬件相匹配 | 个 | 1 |
2 | 工业机器人编程软件 | 与该牌子硬件相匹配 | 个 | 1 | |
3 | 说明书 | 设备的具体使用说明 | 本 | 1 | |
4 | 工程安装材料 | 本 | 1 | ||
5 | 气泵 | 工作压力能满足系统要求 | 只 | 1 | |
6 | 气管 | 与气泵相匹配 | 条 | 1 | |
7 | 编程电缆 | 与硬件相匹配 | 条 | 1 | |
8 | 工具 | 工具箱1只,内六角扳手1套;尖嘴钳1把;十字螺丝刀1把;一字螺丝刀1把;斜口钳1把;十字螺丝刀得力 3×75mm 1把;一字螺丝刀得力 3×75mm 1把;钟表螺丝刀1套;; | 只 | 1 |