


| 加工定制 : | 是 | 类别 : | 齿轮减速机 |
| 齿轮类型 : | 圆锥齿轮减速机 | 布局形式 : | 同轴式 |
| 齿面硬度 : | 硬齿面 | 用途 : | 减速机 |
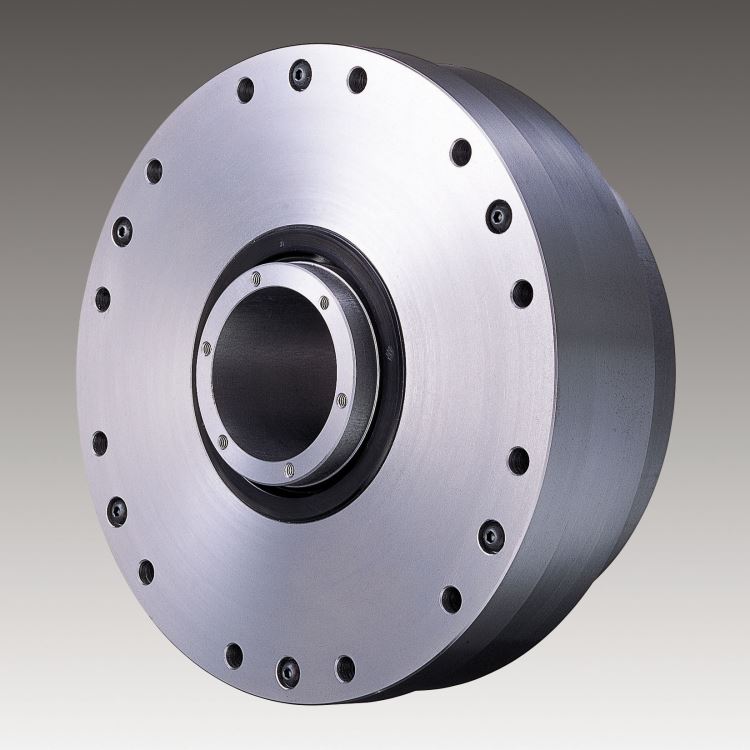
| 品牌 : | 哈默纳科 | 型号 : | SHD-20-160-2SH |
| 级数 : | 三级 |
portant; position: unset !important;">此外,并联机床(机器人)的每一个支链均通过铰链与动、哈默纳科并联机床(机器人)谐波减速机SHD-20-160-2SH静平台相连,正是由于铰链的精度、间隙和接触刚性等问题,使得并联机床(机器人)的实际整体精度和刚性降低。而且,并联的分支链越多,连接这些分支链的.铰链越容易产生叠加的随机性误差,从而影响并联机器人(机床)的整体工作精度。从这个意义上说,也可以解释为何少自由度并联机床(机器人)比六杆并联机床(机器人)哈默纳科并联机床(机器人)谐波减速机SHD-20-160-2SH更易实现实用化。为了克服六杆并联机构上述存在的一些间题,少自由度并联机构特别是三自由度并联机构由于具有工作空间相对较大,奇异性和藕合性相对较小,运动学、动力学分析相对简单,灵活性较高,控制容易,并且设计制造方便等优势,成为近年来国内外研究发展的主流,特别是为了扩大工作空间,申并联结构的混联机床(机器人)亦成为机器人领域的重要发展方向。
portant; position: unset !important;"> 

portant; position: unset !important;">有沟槽的零件可以利用料道上的导轨实现定向送料。供料时,需使零件逐个分离。如果分离机构不能和零件和导轨顺利分开,零件就可能混乱。
portant; position: unset !important;"> 分离机沟是利用凸轮推杆带动有燕尾槽的滑块作左右运动,哈默纳科并联机床(机器人)谐波减速机SHD-20-160-2SH滑块上装有零件挡板及零件分离插杆,分离插杆与滑块联动