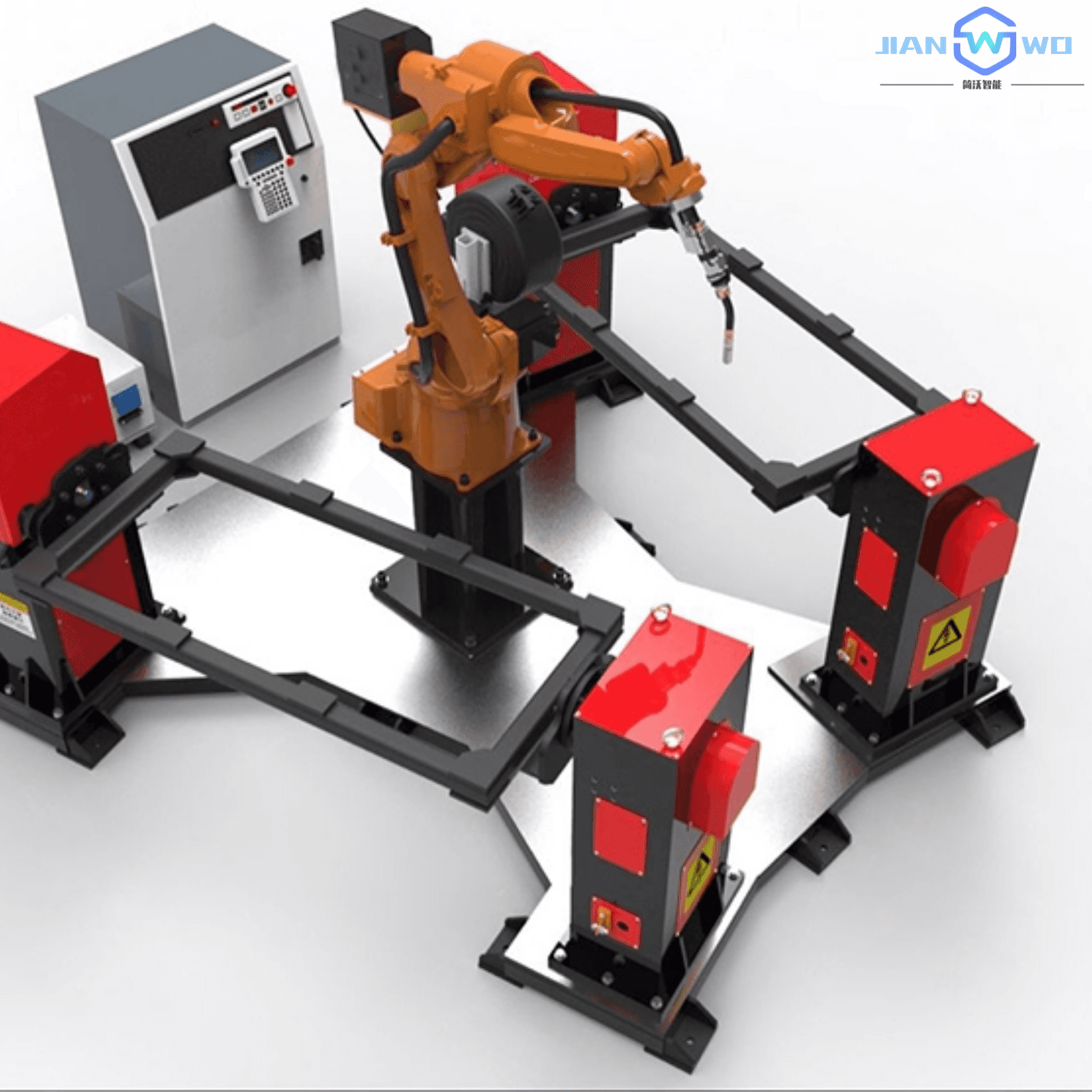

| 工作范围 : | ±360° | 品牌 : | 简沃 |
| 型号 : | JW-2000 | 关节数量 : | 6 |
| 手腕负载 : | 6 kg | 工作半径 : | 4500mm |
| 本体重量 : | 250 kg | 功率 : | 2.2KW |
| 关节速度 : | 322-516°/s | 防护等级 : | IP43 |
| 重复定位精度 : | ±0.03mm | 工作温度 : | 0-45℃ |
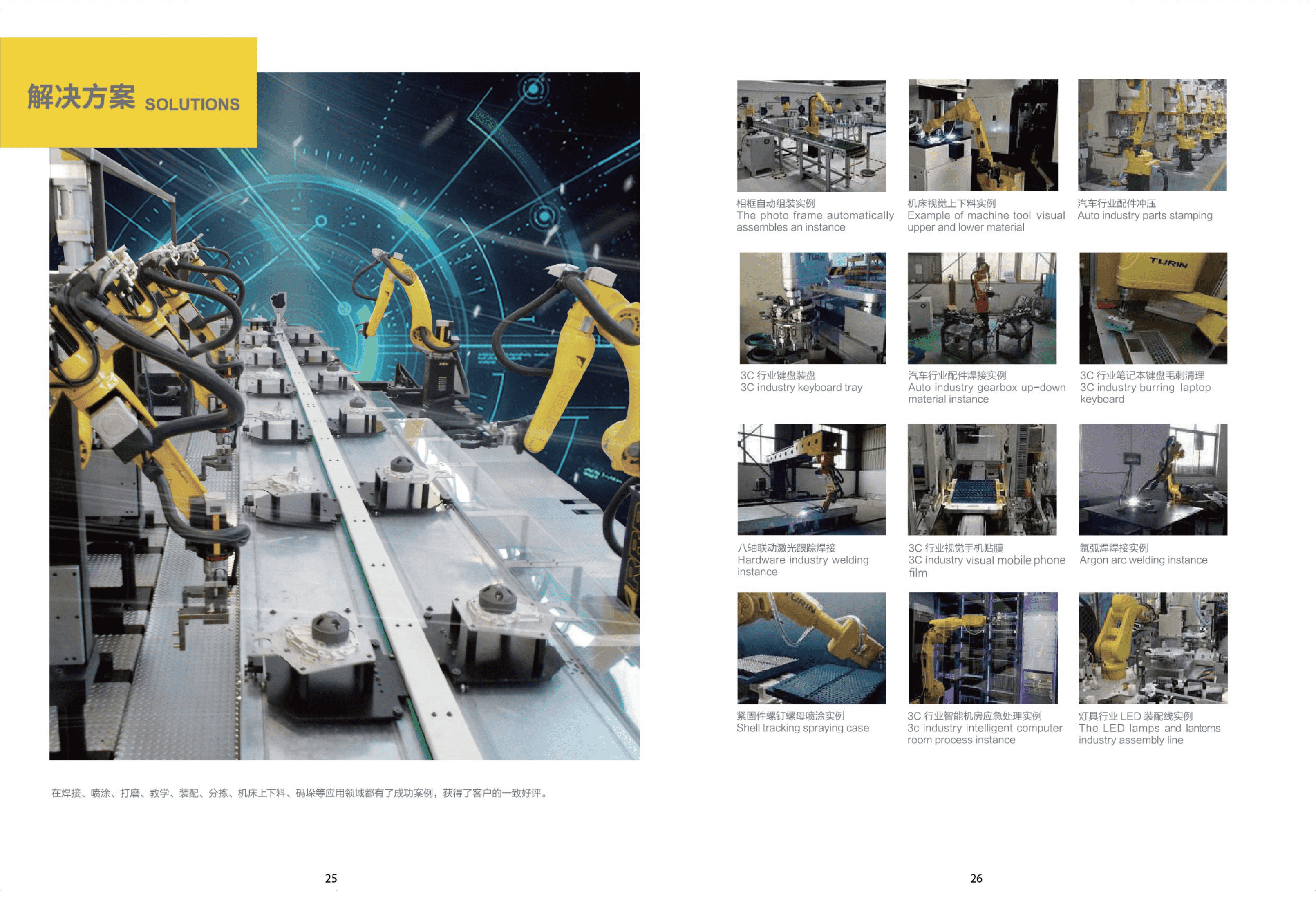
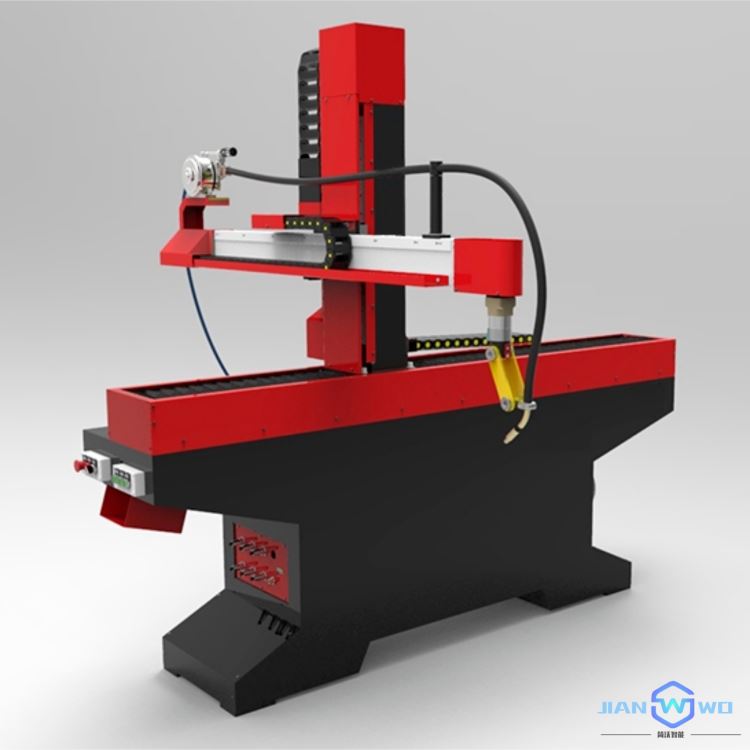
坐标焊接机器人能够模仿人手部的动作,代替人工按指定的焊接轨迹要求进行气保焊,氩弧焊和超声波焊接,并能够在高温高压、粉尘噪音及带有放射性和污染的危险作业环境下实现大批量,重复性强的焊接工作,与传统关节机器日相比,具有定位精度高,焊缝性强,焊接速度快,工作量可控,运行平稳可靠,维修简单方便等特点,并且成本却只相当于关节机器人的百分之二三十,性价比极高。
基本情况说明:
坐标的基本概念:对机器人进行轴操作时,可以使用以下几种坐标系:
1.关节坐标系
机器人各轴进行单独动作,称关节坐标系。
2.直角坐标系
不管机器人处于什么位置,均可沿设定的X 轴、Y 轴、Z 轴平行移动。
3.工具坐标系
工具坐标系把机器人腕部法兰盘所持工具的有效方向作为Z 轴,并把坐标定义在工具的 点。
4.用户坐标系
机器人沿所指定的用户坐标系各轴平行移动。
在关节坐标系以外的其他坐标系中,均可只改变工具姿态而不改变工具 点(控制点)位置,这叫做控制点不变动作。