








| 品牌 : | 理工伟业 | 型号 : | LG-JQR |
| 加工定制 : | 是 | 物料编号 : | 教学实训 |
| 适用范围 : | 工业机器人实训设备 | 电工电器设备名称 : | 自动上下料机器人实训设备 |
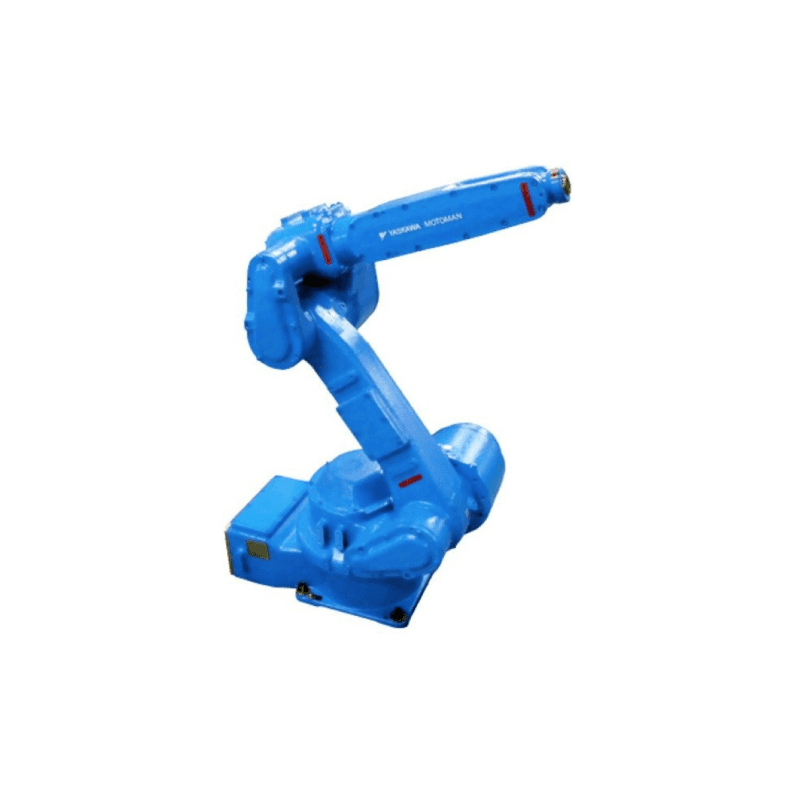
LG-JQR自动上下料机器人实训设备
同级别速性能,实现流线手臂设计及中空电缆。
6轴垂直多关节
负载:12Kg
动态范围:1440mm
控制柜:DX200
用途:搬运、码垛、组装/分装、喷涂
流线型手臂设计,扩大动作范围
全轴低功率输出,无需设置栅栏,设备构成简易
适合短距离作业

技术参数
机器人型号 | MH12 | |
适用控制柜 | DX200 | |
设置*1 | F,W,C | |
自由度 | 6 | |
可搬质量 | 12kg | |
垂直伸长度 | 2511mm | |
水平伸长度 | 1440mm | |
重复定位精度*2 | ±0.08mm | |
动作范围 | S轴(旋转) | -170°~ +170° |
L轴(下臂) | -90°~ +155° | |
E轴(肘) | - | |
U轴(上臂) | -175°~ +240° | |
R轴(手腕旋转) | -180°~ +180° | |
B轴(手腕摆动) | -135°~ +135° | |
T轴(手腕回转) | -360°~ +360° | |
速度 | S轴(旋转) | 220°/s |
L轴(下臂) | 220°/s | |
E轴(肘) | - | |
U轴(上臂) | 220°/s | |
R轴(手腕旋转) | 410°/s | |
B轴(手腕摆动) | 410°/s | |
T轴(手腕回转) | 610°/s | |
容许力矩 | R轴(手腕旋转) | 22N.m |
B轴(手腕摆动) | 22N.m | |
T轴(手腕回转) | 9.8N.m | |
容许惯性力矩 | R轴(手腕旋转) | 0.65kg.m2 |
B轴(手腕摆动) | 0.65kg.m2 | |
T轴(手腕回转) | 0.17kg.m2 | |
本体质量 | 130kg | |
电源容量*3 | 1.5kVA | |
*1:F=置地式,W=挂壁式,C=倒挂式,S=支架式(挂壁式时,S轴的动作会有限制,请注意。)
*2:JIS B 8432为基准。
*3:因用途,动作模式而异。
*4:只限搬运用途。
*5:超过1KG的情况因动作范围有异。请根据对应的负载使用正确的动作范围。
*6:MH6F的时候是1.0kVA。
*7:HP20F的时候是1.5kVA。
*8:斜线部分表示的是S轴在-40° ~ +30°的时候P点无法动作的范围。





 ligong99
ligong99
 ligong99
ligong99
 ligong99
ligong99
 ligong99
ligong99
 ligong99
ligong99
 ligong99
ligong99
 ligong99
ligong99
 ligong99
ligong99
 ligong99
ligong99
 ligong99
ligong99