







| 工作范围 : | 0.5-8 | 品牌 : | 库卡 |
| 型号 : | 二手机器人 | 关节数量 : | 6 |
| 是否跨境货源 : | 否 |
牌的二手机器人配件工业机器人主要部件组成产品:估价:,规格:完善,产品系列编号:齐全
详细说明
二手机器人配件销售维修中心介绍,关于机器人的重要组成部件有哪些?驱动器、传感器、控制器、处理器、软件等都是必不可少的,接下来就给大家简单的分享一下。
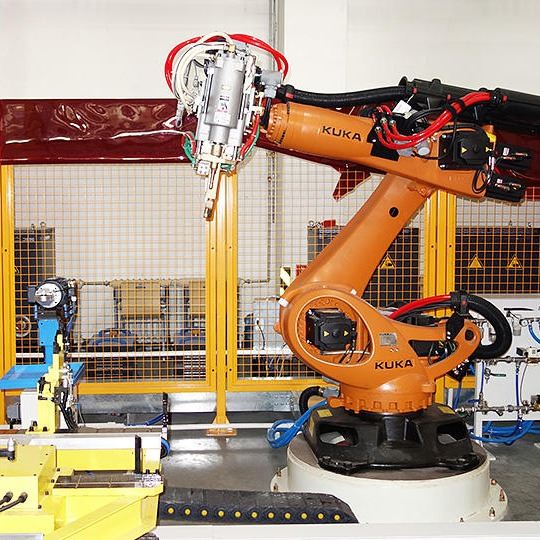
随着中国制造业转型步伐的加快,机器人的使用越来越频繁,作为工厂里的技术工程师必需了解机器人的相关技术,那么通用机器人由什么部件组成呢?
机器人作为一个系统,它由如下部件构成:
机械手或移动车:这是机器人的主体部分,由连杆,活动关节以及其它结构部件构成,使机器人达到空间的某一位置。如果没有其它部件,仅机械手本身并不是机器人。
末端执行器:连接在机械手后一个关节上的部件,它一般用来抓取物体,与其他机构连接并执行需要的任务。机器人制造上一般不设计或出售末端执行器,多数情况下,他们只提供一个简单的抓持器。末端执行器安装在机器人上以完成给定环境中的任务,如焊接,喷漆,涂胶以及零件装卸等就是少数几个可能需要机器人来完成的任务。通常,末端执行器的动作由机器人控制器直接控制,或将机器人控制器的信号传至末端执行器自身的控制装置(如PLC)。
下面进入正题,来说说工业机器人由哪些主要部件组成。
驱动器:驱动器是机械手的“肌肉”。常见的驱动器有伺服电机,步进电机,气缸及液压缸等,也还有一些用于某些特殊场合的新型驱动器,它们将在第6章进行讨论。驱动器受控制器的控制。
传感器:传感器用来收集机器人内部状态的信息或用来与外部环境进行通信。机器人控制器需要知道每个连杆的位置才能知道机器人的总体构型。人即使在完全黑暗中也会知道胳膊和腿在哪里,这是因为肌腱内的系统中的神经传感器将信息反馈给了人的大脑。大脑利用这些信息来测定肌肉伸缩程度进而确定胳膊和腿的状态。对于机器人,集成在机器人内的传感器将每一个关节和连杆的信息发送给控制器,于是控制器就能决定机器人的构型。机器人常配有许多外部传感器,例如视觉系统,触觉传感器,语言合成器等,以使机器人能与外界进行通信。
控制器:机器人控制器从计算机获取数据,控制驱动器的动作,并与传感器反馈信息一起协调机器人的运动。假如要机器人从箱柜里取出一个零件,它的一个关节角度必须为35°,如果一关节尚未达到这一角度,控制器就会发出一个信号到驱动器(输送电流到电动机),使驱动器运动,然后通过关节上的反馈传感器(电位器或编码器等)测量关节角度的变化,当关节达到预定角度时,停止发送控制信号。对于更复杂的机器人,机器人的运动速度和力也由控制器控制。机器人控制器与人的小脑十分相似,虽然小脑的功能没有人的大脑功能强大,但它却控制着人的运动。
处理器:处理器是机器人的大脑,用来计算机器人关节的运动,确定每个关节应移动多少和多远才能达到预定的速度和位置,并且监督控制器与传感器协调动作。处理器通常就是一台计算机(专用)。它也需要拥有操作系统,程序和像监视器那样的外部设备等。
软件:用于机器人的软件大致有三块。一块是操作系统,用来操作计算机。二块是机器人软件,它根据机器人运动方程计算每一个关节的动作,然后将这些信息传送到控制器,这种软件有多种级别,从机器语言到现代机器人使用的高级语言不等。三块是例行程序集合和应用程序,它们是为了使用机器人外部设备而开发的(例如视觉通用程序),或者是为了执行特定任务而开发的。
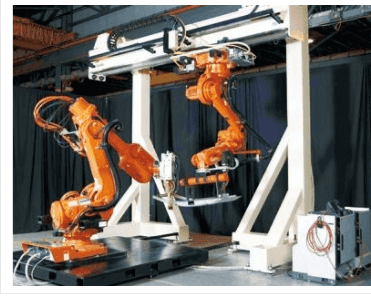
机器人在其工作区域内可以达到的大距离。器人可按任意的姿态达到其工作区域内的许多点(这些点称为灵巧点)。然而,对于其他一些接近于机器人运动范围的极限线,则不能任意指定其姿态(这些点称为非灵巧点)。说明:运动范围是机器人关节长度和其构型的函数。





 13776120141
13776120141
 13776120141
13776120141
 13776120141
13776120141
 13776120141
13776120141
 13776120141
13776120141
 13776120141
13776120141
 13776120141
13776120141
 13776120141
13776120141
 13776120141
13776120141
 13776120141
13776120141